

 联系我们
联系我们






发那科机器人FANUC机器人 CR-4iA 协作机器人
采用LR Mate系列 机型的技术
容易学习
大量的机器人软件 选项
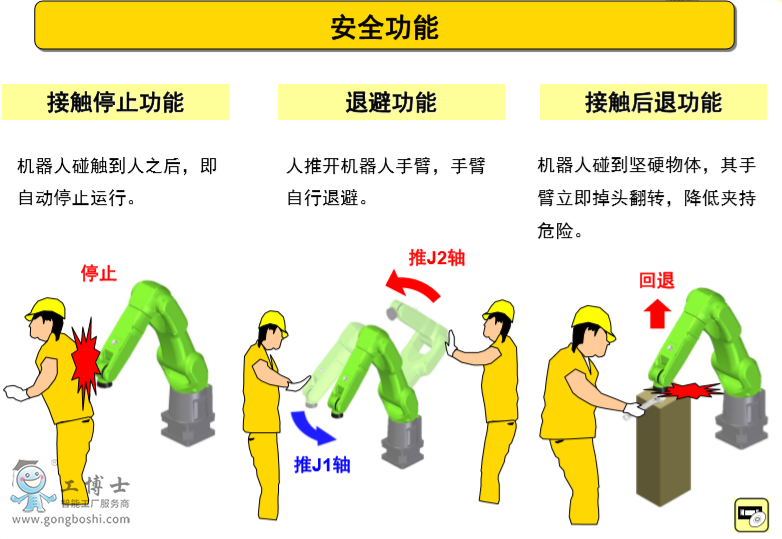
接触停止功能
机器人碰触到人之后,即自动停止运行。
退避功能
人推开机器人手臂,手臂自行退避。
接触后退功能
机器人碰到坚硬物体,其手臂立即掉头翻转,降低夹持危险。
采用顶吊设置的小型协同作业机器人CR-7iA/L
对汽车前窗进行涂胶
特点
无需安全栅栏 人与机器人可在同一区域内作业 采用顶吊设置从上方接近工件,可以覆盖更大
的动作范围 采用顶吊设置可使地面空间得到有效利用

型号 CR-4iA 机构 多关节型机器人 控制轴数 6 轴(J1,J2,J3,J4,J5,J6) 可达半径 550 mm 安装方式 地面安装、倒吊安装、倾斜安装
动作范围
J1 340º J2 150º J3 354º J4 380º J5 200º J6 720º 手腕部*高运动速度(注释1) 500 mm/s(*大1000 mm/s)(注释2) 手腕部*大负载(注释3) 4 kg J3手臂部*大负载(注释4) 1 kg 手腕允许负载转矩 J4 8.86 Nm J5 8.86 Nm J6 4.90 Nm 手腕允许负载惯量 J4 0.20 kgm² J5 0.20 kgm² J6 0.067 kgm² 驱动方式 交流伺服电机驱动 重复定位精度 ± 0.013 mm 机器人质量(注释5) 48 kg 输入电源功率(平均功耗) 1.2 kVA(0.5 kW)
安装条件
环境温度 : 0 ~ 45C 环境湿度 : 通常在75% RH以下(无结露现象),短期在95% RH以下(1个月之内) 注释1)短距离运动时,可能达不到各轴的*高标称速度。 注释2)如果有安全传感器在监控该区域(独立安装)。 注释3)注释4)包括设备和连接线缆等在内的所有质量不能超过此数值。 注释5)不含机器人控制器的质量。
注意 请使用金属帽(选项)和插头盖住未使用的连接器 和空气端口,如果盖帽遗失,未知的物质将会进入机 器人并造成麻烦。 出厂时,为避免灰尘,这些接口都由简易的盖帽 盖住。请记住,这些盖帽不足以用于工厂环境的保护。
在运输中一定要使用特殊的运输
设备和防滑装置,并且不要在机器人和运输设备使用挂钩绳索。不要在机器人安装时出现震动,否则可能会损坏内部传感器。不要移除红框内的部分螺栓,则可能会损坏传感器。在安装或移动运输设备时,请插入机器人底部的填充板,否则可能会损坏内部传感器。
更多机器人信息请点击:发那科机器人
